









Your health is your biggest priority. Your personal health and lifestyle choices significantly impact how long you can be expected...
Free Internet News
Your health is your biggest priority. Your personal health and lifestyle choices significantly impact how long you can be expected...

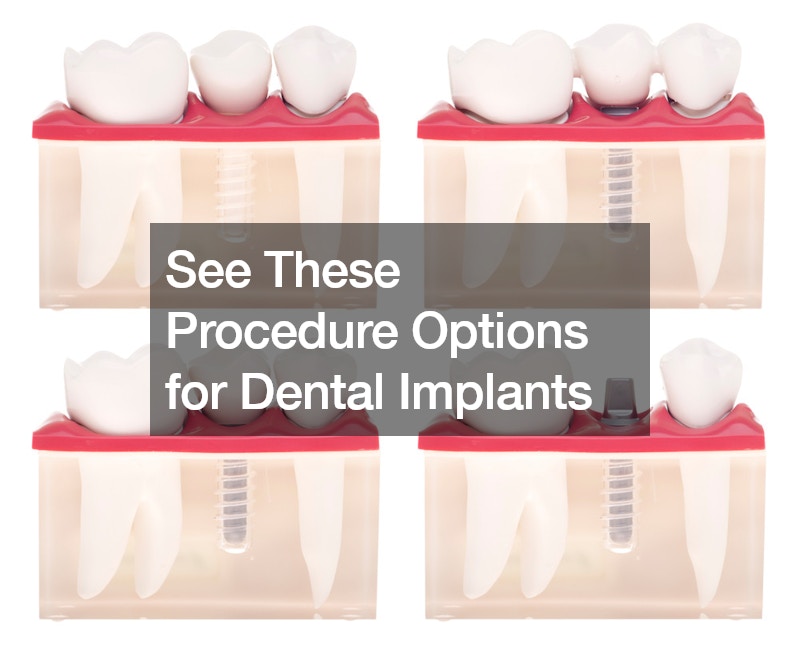
When considering dental implants, it's essential to explore the various procedure options available to determine the best course of treatment...

Buying a used golf cart presents several compelling reasons for consideration. For starters, it offers a cost-effective alternative to purchasing...

Maintaining the proper pH balance in your pool is essential for ensuring clean, clear water and a comfortable swimming environment....

Learning to become a licensed mental health counselor means you could make an impact on hundreds of lives. This video...

Creating a new homeowner maintenance list is highly advisable whether you're moving into a new home for the first time...

Having a case dismissed requires careful strategizing and legal expertise to navigate the complexities of the legal system effectively. Firstly,...

Principle-based financial planning is a holistic approach that emphasizes core values and long-term objectives rather than short-term gains. By focusing...

Prevent slip and fall accidents by managing icy surfaces with salt and maintaining clear, safe pathways. Avoid water damage by...

You've got these huge machines with a liner called a mill liner; they help grind materials into smaller bits. What...

Looking for a way to spice up your weekend without breaking the bank or venturing too far from home? We've...